| [](https://help.mystart.com/uploads/images/gallery/2025-03/hBgimage.png) | [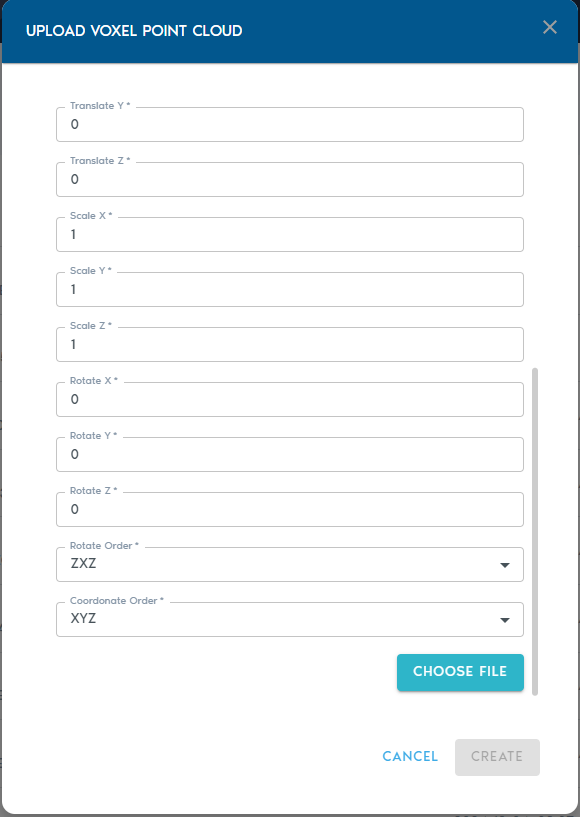](https://help.mystart.com/uploads/images/gallery/2025-03/VB3image.png) |
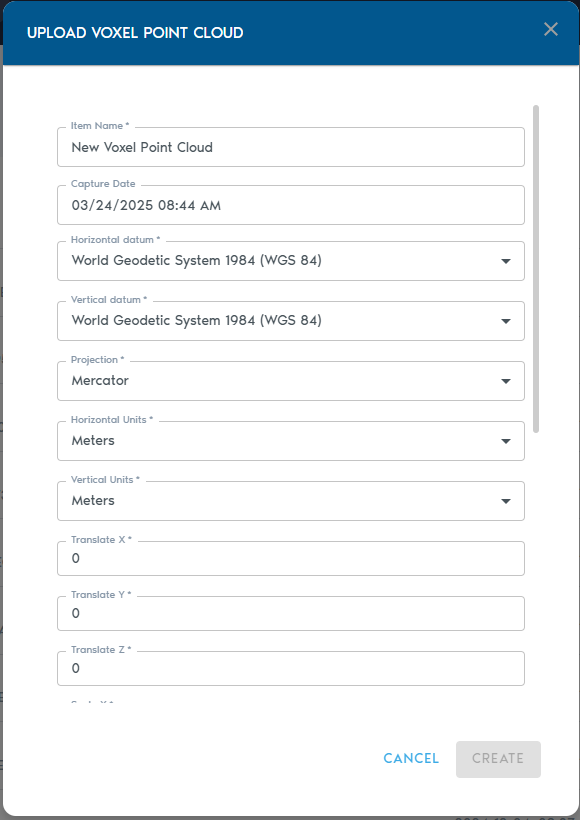
| Item Name | A readable name for the new entity |
| Capture Device | An optional string to identify capture device |
| Capture Date | An optional field containing the original capture date |
| Horizontal Datum | Horizontal datum used in the point cloud |
| Vertical Datum | Vertical datum used in the point cloud |
| Projection | Projection used by the point cloud |
| Horizontal Units | Horizontal unit type used in the point cloud |
| Vertical Units | Vertical unit type used in the point cloud |
| Translate XYZ | These fields allow translating the mesh position by the specified amounts along each coordinate axis |
| Scale XYZ | These fields allow scaling the mesh by the specified amounts along each coordinate axis. A value of 1.0 represents the original scale |
| Rotate XYZ | Euler rotation angles for each coordinate axis. |
| Rotation Order | Euler rotation angle sequence. |